Opened 15 years ago
Last modified 15 years ago
#1599 closed defect (worksforme)
initial values not respected in inertia-clutch model
| Reported by: | Peter Junglas | Owned by: | Peter Junglas |
|---|---|---|---|
| Priority: | high | Milestone: | |
| Component: | Version: | ||
| Keywords: | Cc: | Peter Junglas, |
Description
The attached model contains two inertias coupled by a clutch. The initial velocities have different values, but the simulation uses w = 0 for both. Setting the initial state of the clutch to unlocked doesn't help.
loadModel(Modelica,{"3.1"});
loadString("
model testJInit
annotation(Diagram(), experiment(StartTime = 0.0, StopTime = 2.0, Tolerance = 1e-06));
Modelica.Mechanics.Rotational.Components.Clutch clutch1(mue_pos = [0,0.5], peak = 1.3, cgeo = 0.4, fn_max = 1000, locked(start = false, fixed = true)) annotation(Placement(visible = true, transformation(origin = {-8.5,11.5}, extent = {{-15,-15},{15,15}}, rotation = 0)));
Modelica.Mechanics.Rotational.Components.Inertia inertia2(J = 5, stateSelect = StateSelect.default, w(start = 0, fixed = true)) annotation(Placement(visible = true, transformation(origin = {31,12}, extent = {{-15,-15},{15,15}}, rotation = 0)));
Modelica.Mechanics.Rotational.Components.Inertia inertia1(J = 1, stateSelect = StateSelect.default, w(start = 200, fixed = true)) annotation(Placement(visible = true, transformation(origin = {-50,11}, extent = {{-15,-15},{15,15}}, rotation = 0)));
Modelica.Blocks.Sources.Constant constant1(k = 1) annotation(Placement(visible = true, transformation(origin = {-8.5,62.5}, extent = {{-15,-15},{15,15}}, rotation = 0)));
equation
connect(constant1.y,clutch1.f_normalized) annotation(Line(points = {{-8.5,46},{-8.5,42},{-8.5,28},{-8.5,28}}));
connect(clutch1.flange_b,inertia2.flange_a) annotation(Line(points = {{6.5,11.5},{16.5,11.5},{16.5,12},{16,12}}));
connect(inertia1.flange_b,clutch1.flange_a) annotation(Line(points = {{-35,11},{-23.5,11},{-23.5,11.5},{-23.5,11.5}}));
end testJInit;
");
simulate(testJInit,startTime=0.0,stopTime=2.0);
plot3({inertia1.w, inertia2.w});
Attachments (3)
{kind=link}
{kind=link}
Change History (4)
by , 15 years ago
| Attachment: | testJInit.mos added |
|---|
comment:1 by , 15 years ago
comment:2 by , 15 years ago
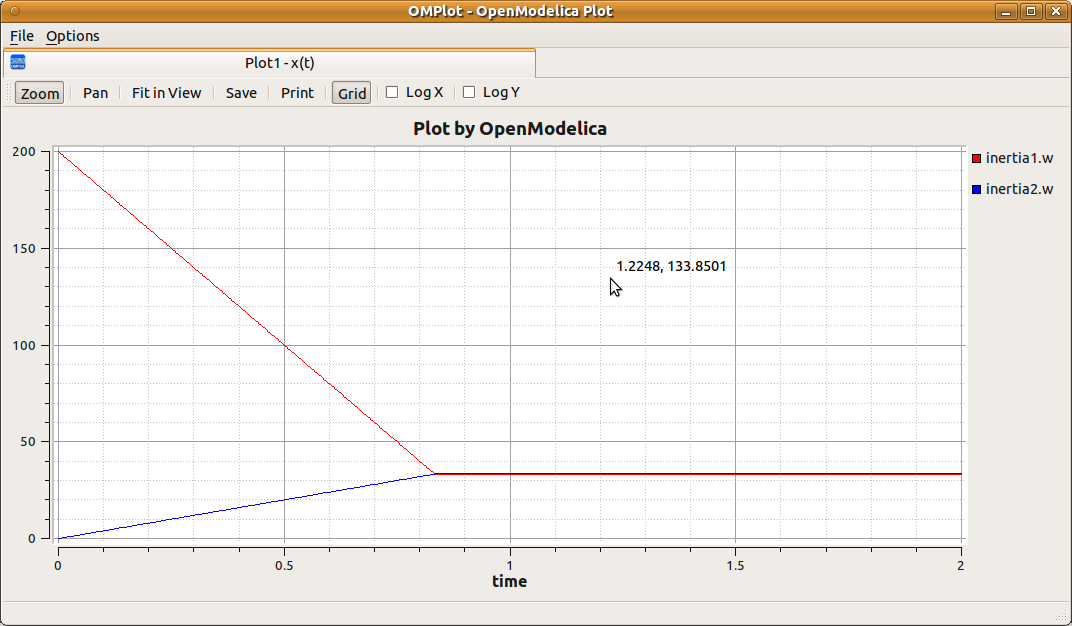
Your plot shows exactly what I'd like to see.
I'm using 9040-1, because the daily build doesn't work for me (cf. my post in the forum).
Note:
See TracTickets
for help on using tickets.
What version of OpenModelica are you running? For me, the starting values are 0 and 200 (will attach a screenshot).